- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2018 > IEEE > DIGITAL IMAGE PROCESSING
Terrestrial laser scanning (TLS) is an important technique for tree stem detection. In this paper, a point-based method for stem detection is proposed using single-scan TLS data. One of the main concerns is the point density, which decreases rapidly with the increasing distance to the scanner position. In the proposed method, the search radius is generated adaptively, based on the relationship between the distance and point density, to make sure that the neighborhood maintains a similar scale to the corresponding point density. The belonging of each point is recognized with cuckoo search-based support vector machine, and the points labeled as stem are then clustered and filtered for further verification. The threshold for the small cluster filtering is also adaptive to deal with the problem of the cluster point number decreasing as a function of distance. The stem position is calculated with the lowest cylinder from the cluster segmentation and modeling for the stem mapping. Experiments were carried out on two plots with radii of more than 130 m. The overall detection rate was 76.1%, and 75% of the stems outside 80 m were detected with the adaptive radius, despite the point density being less than 5 cm.
Euclidean clustering algorithm, vegetation density mapping.
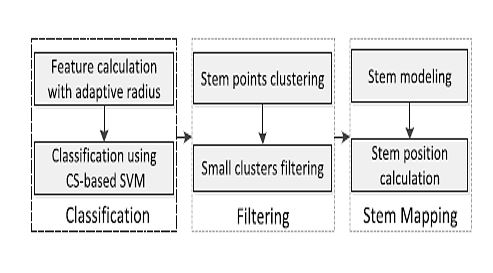
In this paper, we propose a point-based method to detect tree stems on a large-scale mountain slope, with the large point density variation as one of the main concerns. Several features are extracted in the spherical neighborhood of each point, and the stem points are delineated by a classification method. The stem positions are then calculated based on the classification result. Following are the main contributions of this paper. 1) The search radius for the feature detection and the threshold for the small point cluster filtering are generated adaptively, based on the relationship between point density and distance to the scanner position. 2) Cuckoo search (CS)-based support vector machine (SVM) is exploited to delineate stem points with the extracted point features, such as dimensionality features, the normal vector, and intensity. 3) The stem position is calculated with the intersection point between the triangulated irregular network (TIN) of the terrain and the lowest cylinder from the stem cluster segmentation and modeling, placing no assumption on the stem direction.
BLOCK DIAGRAM