- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2018 > IEEE > DIGITAL IMAGE PROCESSING
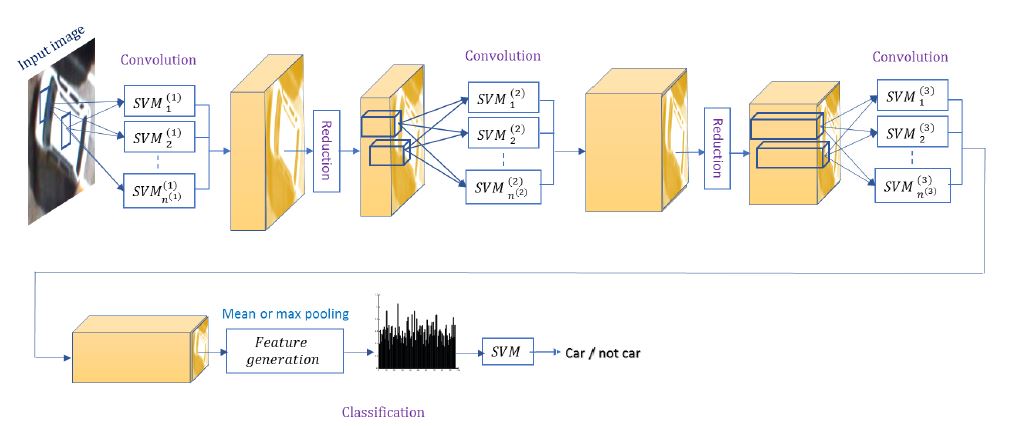
Nowadays, unmanned aerial vehicles (UAVs) are viewed as effective acquisition platforms for several civilian applications. They can acquire images with an extremely high level of spatial detail compared to standard remote sensing platforms. However, these images are highly affected by illumination, rotation, and scale changes, which further increases the complexity of analysis compared to those obtained using standard remote sensing platforms. In this paper, we introduce a novel convolutional support vector machine (CSVM) network for the analysis of this type of imagery. Basically, the CSVM network is based on several alternating convolutional and reduction layers ended by a linear SVM classification layer. The convolutional layers in CSVM rely on a set of linear SVMs as filter banks for feature map generation. During the learning phase, the weights of the SVM filters are computed through a forward supervised learning strategy unlike the backpropagation algorithm widely used in standard convolutional neural networks (CNNs). This makes the proposed CSVM particularly suitable for detecting problems characterized by very limited training sample availability. The experiments carried out on two UAV data sets related to vehicles and solar-panel detection issues, with a 2-cm resolution, confirm the promising capability of the proposed CSVM network compared to recent state-of-the-art solutions based on pretrained CNNs.
Local response normalization (LRN)
In this paper, we propose an alternative learning strategy based on SVMs for handling these scenarios. SVMs are among the most popular supervised classifiers available in the literature. They rely on the margin maximization principle which makes them less sensitive to overfitting problems. They have been intensively used in conjunction with handcrafted features for solving various recognition problems. In addition, as discussed previously, they are also commonly placed on the top of a CNN feature extractor for carrying out the classification task. In this paper, we extend them to act as convolutional filters for the supervised generation of features maps. We term this network as a convolutional SVM (CSVM). The major contribution of this paper can be summarized as follows. 1) Introduce a novel CSVM network suitable for problems with small training data. 2) Extend SVMs to act as convolutional filters for generating feature representation maps. 3) Present a forward supervised learning strategy for computing the weights of the network. 4) In the experiments, we validate the method on UAV images with 2-cm resolution acquired over urban areas related to vehicle and solar-panel detections.
BLOCK DIAGRAM