- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2018 > IEEE > DIGITAL IMAGE PROCESSING
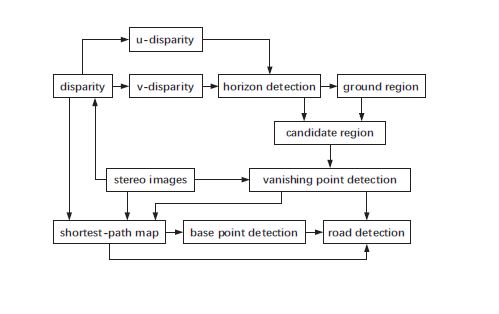
In this paper, we propose a vanishing-point constrained Dijkstra road model for road detection in a stereovision paradigm. First, the stereo-camera is used to generate the u- and v-disparity maps of road image, from which the horizon can be extracted. With the horizon and ground region constraints, we can robustly locate the vanishing point of road region. Second, a weighted graph is constructed using all pixels of the image, and the detected vanishing point is treated as the source node of the graph. By computing a vanishing-point constrained Dijkstra minimum-cost map, where both disparity and gradient of gray image are used to calculate cost between two neighbor pixels, the problem of detecting road borders in image is transformed into that of finding two shortest paths that originate from the vanishing point to two pixels in the last row of image. The proposed approach has been implemented and tested over 2600 grayscale images of different road scenes in the KITTI dataset. The experimental results demonstrate that this training-free approach can detect horizon, vanishing point and road regions very accurately and robustly. It can achieve promising performance.
Hough transform, maximum likelihood method.
The contributions of this paper are as follows: (1) To detect horizon, we propose a weight-sampling RANSAC-like method to detect the road profile line from the improved v-disparity map. (2) We propose a stereo-vision based road vanishing point detection method. (3) We propose a vanishing-point constrained Dijkstra model for road segmentation.
BLOCK DIAGRAM