- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2019 > NON IEEE > EMBEDDED SYSTEMS
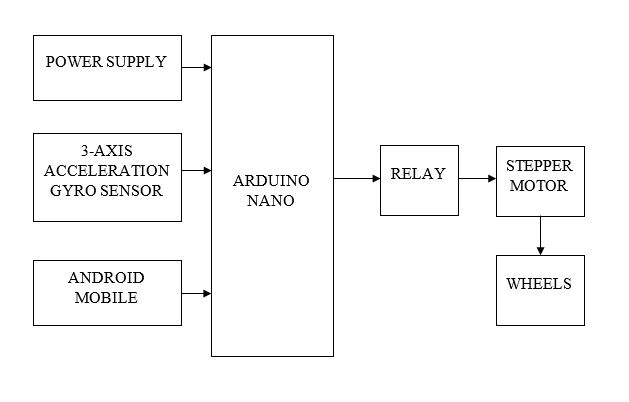
In this project, we propose a balancing robot system that can operate wirelessly through mobile app based on Arduino. We design the shape of the robot using 3D modeling, and make a designed robot using 3D printing technology. In addition, a two-wheel drive robot is equipped with Arduino to control the balancing of the robot and to operate the robot via WIFI. The purpose of PID control is to measure the output of the object to be controlled and to calculate the error to extract the necessary value for control. In this method, a balancing robot is implemented by PID control. The outline of the robot is produced through 3D printing. Controlling the balancing robot through Arduino programming and moving the robot by controlling the stepping motor and the sub motor based on the communication of the WIFI module.
BLOCK DIAGRAM