- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2019 > NON IEEE > EMBEDDED SYSTEMS
Automated processes in the field of agriculture have become more and more reliable and efficient. There are many difficulties faced when manpower is used. It is time consuming and becomes tedious. Robotic systems integrated with various control methods can be very useful in doing repetitive work, such as seed sowing process where the same movement is continuous. Previous weed removal robots included optical image sensing which makes the system more costly. Our robot is cost-effective which eliminates optical sensors. In this project, we have developed a Trainable automatic robot which helps in removing unwanted weed on agricultural fields using gesture to control a three-axis robotic arm to do the necessary work. The arm is placed on a rover which is controlled wirelessly using Bluetooth. The arm is taught to do the repetitive motion with a gesture using a hand glove to do the necessary work. The setup of the rover with attached the robotic arm is tested and evaluation under normal environmental conditions.
Flex sensor and DC Motor
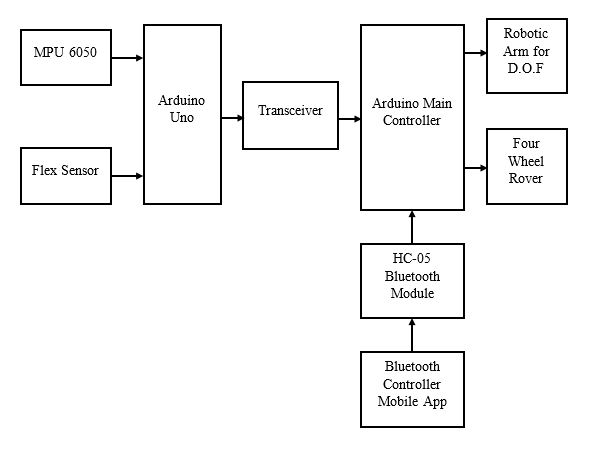
Gesture control is achieved by using the accelerometer which uses MEMS technology and by using the Flex Sensor. The gestures control the arm according to the user’s wrist and the forefinger movement. The Sensors, controllers and the transmitters are fixed on the wearable hand glove. The arrangement in the glove will be powered by the separate power source. The wrist movement and the forefinger movement control the end effector of the arm. The Motors which are attached to the wheels of the rover are driven by the motor driver IC LM293D. Similarly, the dc motors connected to the arm gets commands through the driver ICs. Using four different gestures for each d.o.f the arm will work in the field. So where ever the weeds are present the user can control the direction of the arm to remove it by giving particular gesture movements. The flex sensor will work as a variable resistor and its resistance varies with the position of a finger the changes and the reference resistance will be sent to the Arduino to attain the required position. This arm can be used with two modes according to end effector either a Gripper or a motor with the cutting blades. If the gripper is used it can be controlled by gestures and if the cutter is used it can be switched on and off using the control switch fixed on the rover. Further, the dc motors running speed can be easily controlled by implementing PWM techniques.
BLOCK DIAGRAM