- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2018 > IEEE > DIGITAL IMAGE PROCESSING
An effective lane-detection algorithm is a fundamental component of an advanced driver assistant system, as it provides important information that supports driving safety. The challenges faced by the lane detection and tracking algorithm include the lack of clarity of lane markings, poor visibility due to bad weather, illumination and light reflection, shadows, and dense road-based instructions. In this paper, a robust and real-time vision-based lane detection algorithm with an efficient region of interest is proposed to reduce the high noise level and the calculation time. The proposed algorithm also processes a gradient cue and a color cue together and a line clustering with scan-line tests to verify the characteristics of the lane markings. It removes any false lane markings and tracks the real lane markings using the accumulated statistical data. The experiment results show that the proposed algorithm gives accurate results and fulfills the real-time operation requirement on embedded systems with low computing power.
Particle-filtering technique (for tracking) and a Random Sample Consensus (RANSAC) algorithm
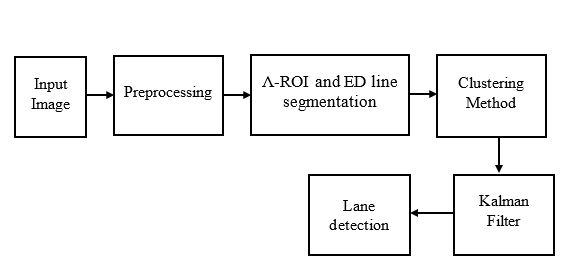
In this proposed work, a robust and fast lane detection and tracking algorithm is proposed that consists of three steps: initialization, lane detection, and lane tracking. The proposed algorithm verifies the lane markings using the scan-line method that determines the validity of the detected lane markings. It removes the false lane markings and tracks the real lane markings using accumulated statistical data. The improved lane tracking methods in É…-ROI reduces noisy line segments and increases the detection rate. The proposed algorithm consists of initialization, lane marking detection, and lane marking tracking. The lane marking tracking is the main operation process, while the initialization and the lane marking detection set up the rectangular ROI and the É…-ROI.
BLOCK DIAGRAM