- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > COMPUTER > 2019 > NON IEEE > APPLICATION
The propose method for detecting obstacles by comparing input and reference train frontal view camera images. In the field of obstacle detection, most methods employ a machine learning approach, so they can only detect pre-trained classes, such as pedestrian, bicycle, etc. This means that obstacles of unknown classes cannot be detected. To overcome this problem, I propose a background subtraction method that can be applied to moving cameras. First, the proposed method computes frame-by-frame correspondences between the current and the reference (database) image sequences. Then, obstacles are detected by applying image subtraction to corresponding frames. To confirm the effectiveness of the proposed method, I conducted an experiment using several image sequences captured on an experimental track. Its results showed that the proposed method could detect various obstacles accurately and effectively.
Safety is an important topic for any railway system. In the existing system, an automated system should observe the area in front of a train and detect objects on the track. Multi sensor was used to monitors the track in front of a train. This setup consists of three video camera and an infrared radar system. In the existing system, all detected objects are fed into a Kalman filter for data fusion and tracking. A decision algorithm determines if a tracked object is a dangerous. If an obstacle is detected then message was sent to the vehicle which takes appropriate steps to reduce danger.
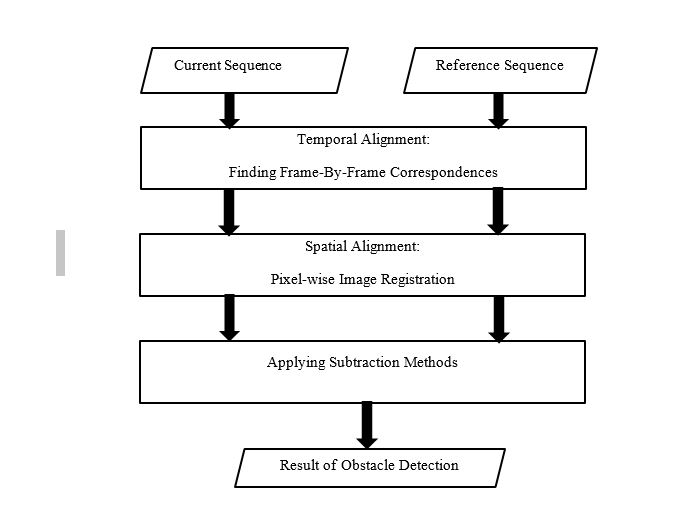
In the proposed system, the unknown obstacles are detected by using image subtraction method. It finds a reference frame captured at the most similar location to the current frame by image sequence matching. Then, it performs pixel-wise registration between the current frame and its corresponding reference frame. Finally, multiple image subtraction methods are applied to compute the image difference between the two frames and obstacles are detected by integrating their outputs.
ARCHITECTURE DIAGRAM