- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2018 > IEEE >
Guide dogs may also assist visually impaired persons to avoid obstacles in their travel path. However, guide dogs require training and fully trained guide dogs are very costly. In addition, it is a challenging task for a visually impaired person to care appropriately for another living thing. Navigation assistance for visually impaired (NAVI) refers to systems that are able to assist or guide people with vision loss, ranging from partially sighted to totally blind, by means of sound commands. This project describes the development of a navigation aid in order to assist blind and visually impaired people to navigate easily, safely and to detect any obstacles. The system is based on an Arduino microcontroller with synthetic audio output. In addition, it consists of four buzzers, four ultrasonic sensors mounted on the user’s device. This aid is able to guide the blind on the distance of over-hanging obstacles within six meters along the travel path ahead of the user. The proposed system has been tested on a wide variety of scenarios, giving successful results and showing that the system is robust and works in challenging indoor environments. The evaluation results show that NavGuide is a useful aid in the detection of obstacles, wet floors, and ascending staircases and its performance is better than that of a white cane.
The existing system explained a robotic navigation aid called a co-robotic cane (CRC). In an indoor environment for both pose estimation and object recognition, the CRC uses a three-dimensional (3D) camera. In active mode, it guides the user by steering itself into the desired direction of travel, while in the passive mode it functions as a white cane with enhanced computer-vision. The disadvantage of most camera based solutions is their limited field of view.
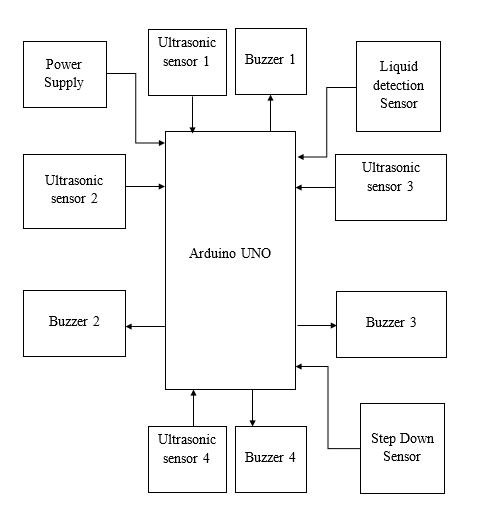
The system is based on an Arduino microcontroller with synthetic audio output. In addition, it consists of four buzzers, four ultrasonic sensors, liquid detection sensor and dimple detection sensor which are mounted on the user’s device. The four ultrasonic sensors are attached on left, right, front and back side of the user’s device. An ultrasonic sensor is used to send transmission, reception waveforms with high frequency for finding the obstacle. This aid is able to guide the blind on the distance of over-hanging obstacles within six meters along the travel path ahead of the user. Ultrasonic sensor and buzzer attached to left-side of a shoe which alarms on detection of an obstacle on the left side, a second buzzer is attached to right side of a shoe which alarms on detection of an obstacle on right side, a third buzzer is attached to the front side of a shoe which alarms on detection of an obstacle in front of system, and a fourth buzzer is attached to the back side of the shoe which alarms on detection of an obstacle. An Arduino microcontroller circuit gather inputs from sensors and managing audio as outputs. A liquid detection sensor is used to detect wet floor and also a step down sensor is used to detect the descending staircases and dimples. Here an IR sensor used as a step down sensor.
BLOCK DIAGRAM