- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2019 > IEEE > DIGITAL IMAGE PROCESSING
High-resolution remote sensing images are abundant in texture information, and the detection method of the change of pixel-level mainly analyzes the spectral information of the image, which has certain limitations. In this paper, a high-resolution remote sensing image change detection method combining pixel and object levels is proposed to solve the problem that many pepper and salt phenomenon and false detection in the change detection of pixel-level and object-level change detection method are cumbersome for image segmentation process. We integrate the multi-dimensional features of high-resolution remote sensing images and use random forest classifiers to classify to obtain the pixel-level change detection results. Then, we use the improved U-net network to semantically segment the post-phase remote sensing image to obtain the image object segmentation result. Finally, the consequences of pixel-level change detection and image object segmentation result are fused to obtain the image changing area and the unchanging area. The experimental results demonstrate that the algorithm has a higher accuracy rate and detection precision.
Support vector machine, superpixel segmentation algorithm
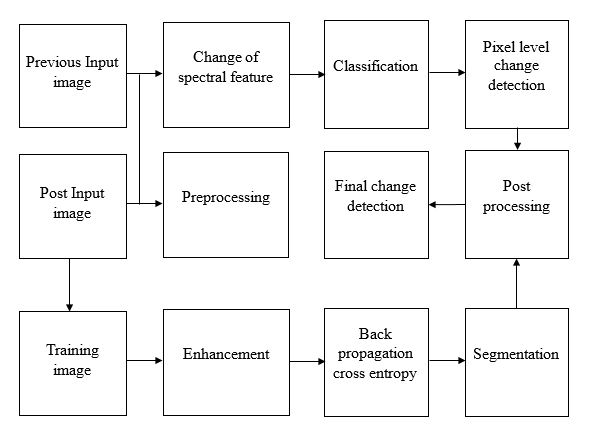
This system which mainly includes the following three steps: (1) Perform spectral feature differences and texture feature extraction on two-phase images, and merge the two features. Perform random forest classification on the merged features to obtain initial pixel-level detection results. (2) Use the improved U-net network to carry out semantic segmentation on the post-phase image; (3) Merge the pixel-level detection result with the semantic segmentation result, and the detection result graph is obtained after removing isolated and noise points.
BLOCK DIAGRAM