- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2019 > IEEE > DIGITAL IMAGE PROCESSING
Curve is the traffic accident-prone area in the traffic system of the structural road. How to effectively detect the lane-line and timely give the traffic information ahead for drivers is a difficult point for the assisted safe driving. The traditional lane detection technology is not very applicable in the curved road conditions. Thus, a curve detection algorithm which is based on straight-curve model is proposed in this paper and this method has good applicability for most curve road conditions. First, the method divides the road image into the region of interest and the road background region by analyzing the basic characteristics of the road image. The region of interest is further divided into the straight region and the curve region. At the same time, the straight-curve mathematical model is established. The mathematical equation of the straight model is obtained by using the improved Hough transform. The polynomial curve model is established according to the continuity of the road lane-line and the tangent relationship between the straight model and the curve model. Then, the parameters of the curve model equation are solved by the curve fitting method. Finally, the detection and identification of the straight and the curve are realized respectively and the road lane-line is reconstructed. Experiments show that this method can accurately identify the curve lane-line, provide effective traffic information, make early warning and it also has a certain universality.
Clustering algorithm, Canny edge detection
The proposed method divides the road image into the region of interest and the road background region by analyzing the basic characteristics of the road image. The region of interest is further divided into the straight region and the curve region. At the same time, the straight-curve mathematical model is established. The mathematical equation of the straight model is obtained by using the improved Hough transform. The polynomial curve model is established according to the continuity of the road lane-line and the tangent relationship between the straight model and the curve model. Then, the parameters of the curve model equation are solved by the curve fitting method. Finally, the detection and identification of the straight and the curve are realized respectively and the road lane-line is reconstructed.  
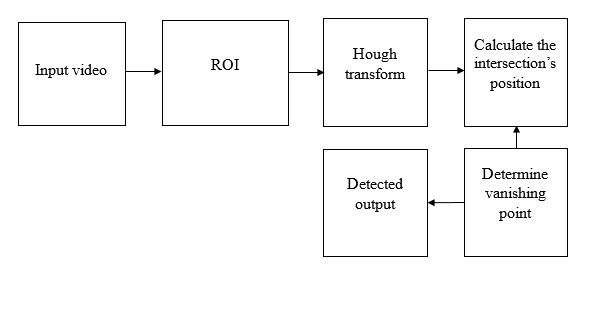
BLOCK DIAGRAM