- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2019 > IEEE > DIGITAL IMAGE PROCESSING
With the advent of the Internet+ era, intelligent transportation has become a hotspot and frontier in the study of traffic development in the world. On the basis of traditional basic transportation facilities, informationization, communication and intelligent control are integrated to generate intelligent traffic management applications. It has become an important symbol of the information age and has become an important condition for smart cities. In this paper, based on the difference between night vehicle detection and daytime vehicle detection, a Hough transform night vehicle intelligent detection method is proposed. First, the headlights are extracted by grayscale division, and then the extracted lights are divided into connected domains and extracted to the edge of the lamp; then the circle is detected by Hough transform, and then the radius of the lamp is taken and Positioning of the position in the vehicle; finally, since the normal lights will appear in pairs, the vehicle position is matched to determine the position of the vehicle. The experimental results show that the algorithm has high detection rate for night vehicle detection and low false alarm.
Adaboost algorithm, boosted cascade of simple features
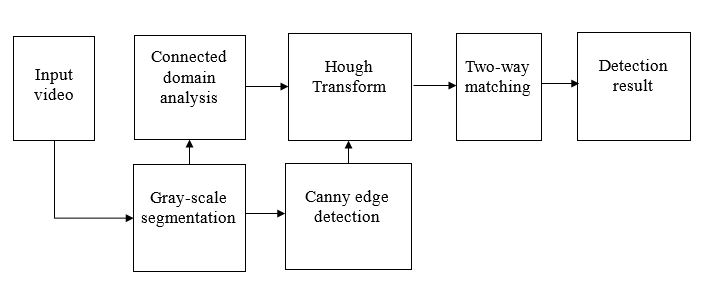
In this paper, the Hough transform night vehicle intelligent detection headlight technology is improved. In order to detect the vehicle, the vehicle light is the object to be detected first. Firstly, extracts the headlights by means of gray-scale segmentation, and performs connected-domain analysis and edge extraction on the extracted headlights. Then, according to the connected-domain analysis information, the sub-pictures are intercepted by the edge extraction results, and Hough is performed for each sub-picture. Circle detection, get the radius and position of the lights, and finally match the detected lights to identify the vehicle.  
BLOCK DIAGRAM