- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2020 > IEEE > DIGITAL IMAGE PROCESSING
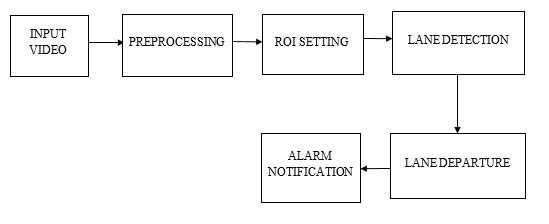
Lane departure warning systems have gained considerable research interest in the past decade for its promising usage in automotive, where lane detection and tracking is applied. However, it is a challenging task to improve the robustness of lane detection due to environmental factors, such as perspective effect, possible low visibility of lanes, and partial occlusions. To deal with these issues, we propose a reliable vision-based real-time lane markings detection and tracking system that can adapt to various environmental conditions. The lane detection is composed of three stages: pre-processing, Adaptive Region of Interest (AROI) setting, and lane marking detection and tracking. In the pre-processing stage, smoothing and edge detection operators are applied on input frames to automatically obtain binary images, then, lane markings segmentation are carried out. After that, An Adaptive Region of Interest is extracted to reduce the computational complexity. In the subsequent detection stages, Kalman filter is employed to track road boundaries detected in the AROI using Progressive Probabilistic Hough Transform (PPHT) in the next frame. Based on road boundaries and the vehicle’s position, the proposed algorithm decides if the vehicle has drifted off the lane.
Warp Perspective Mapping (WPM), Inverse Perspective Mapping (IPM)
In the pre-processing stage, images are transformed to grey scale image and smoothed. Then, edge detection is applied using Sobel filter. Finally, Otsu’s thresholding is applied to automatically obtain binary images and to cope with the lighting challenges. According to the gradient information obtained by the Otsu segmentation step, we propose to identify a simple Adaptive Region of Interest (AROI) by using a horizon line in order to reduce the computational complexity. Since SHT presents a significantly high false positive rate and high computational complexity PPHT is used to cope with these limitations. Kalman filter is used to track both borders of each lane markings. This additional lane-tracking step increases the probability to detect lane markings in poor conditions and improves the robustness and the efficiency of road lane detection.
BLOCK DIAGRAM