- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2021 > NON IEEE > EMBEDDED SYSTEMS
Nowadays due to this covid-19 situation all peoples understanding importance of Hygiene and in real this was very worst but we can fight against it. As we know when someone come in contact with that viruses that person get infected. We can avoid it by staying in home but what about doctors, workers in hospitals. They have to play their role any how so by considering this all we developed a bot which can clean rooms floors as well as bot sanitize rooms also and its completely automatic. So without any human interference we can clean hospitals, homes etc. so there are lesser chances of getting infected. This paper presents the design, development and fabrication of prototype automatic bot “Mr. Clean-X” is an automated machine that facilitates the user cleaning and sanitization.
This system presented the implementation of patients temperature measurement system for the medical robotic assistant. They have experimented with MLX90614 infrared thermometer and FLIR Lepton thermal camera and found outthattheMLX90614infraredthermometercannot be used as the only input source of the system and to get more accurate results, robot would need to come as close as less than 0.3 metres to a patients face. To overcome this, they created a hybrid system having infrared thermometer along with thermal camera to provide ambient temperature and approximate skin temperature that can be used to detect presence of humans in front of the robot.
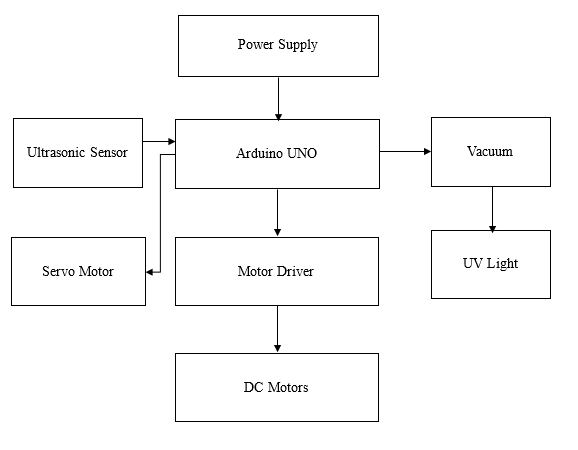
When we switch on the robot, vacuum and UV light switched on and the Ultra sonic sensor which is mounted on servo motor it going to transmit signals and whenever it detects obstacle in front of robot that signals strike on obstacle and received back as by sensor so by considering time factor it going to determine distance from obstacle if it’s less than our given range that time it change its direction of moving. Firstly, user initialize trigger and echo pin as low and push the robot in forward direction and when obstacle is detected echo pin will give input as high to microcontroller. After determining the time, it converts into a distance. If the distance of object is moderate then speed of robot get reduced and will take left turn, if obstacle is present in left side then it will take right turn and if all sides obstacle is present it take backward that is the moving strategy of robot. Arduino board is connected with DC Motor through Motor driver (pin10, pin11, pin12, pin13) which provides power to the actuators. Actuators are used to move robot in Left, Right, Forward and Backward, directions. The simple description of inputs pins for movements of robot is as per given table. Robot stops when it detects obstacle and then ultrasonic sensors give time in length to the microcontroller as an input for further movements. Here we using obstacle avoiding robot concept.
BLOCK DIAGRAM