- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2021 > NON IEEE > EMBEDDED SYSTEMS
This project shows design and implementation of the Line Follower Robot and its ability to select the desired line among black and white line. This can be combined with different colours. Since each colour has its own distinct property, robot can therefore easily differentiate among different colours and possess the ability to detect the presence of an obstacle and choose the other path to find its target. It is programmed in such a way that instructions are given to the robot which senses a line and attempts to move towards the target. The robot can easily move along very congested curves as it continuously data from the sensors. This robot avoids collision and it can detect collision with an obstacle sensor and hence reaching the target. The proposed system can be implemented in any commercial, industrial, medical and also in educational labs.
The Colour Line follower robot is a mobile machine that can detect and follow the colour line drawn on the floor. Here LED and LDR based sensors are used here to sense the line. Four LEDs (Tx) and LDR sensors (Rx) facing the ground has been used in this setup. Two of them are used as line detectors and rest of them is used for detecting destination. The output of the sensors is analog in nature which depends on the amount of light reflected back. This analog signal is then processed to produce digital data containing information about the line and color. An IR obstacle sensor is used to gather information about nearby obstacle that may block the line. Processing all those data from installed sensors, the robots brain generates control signals automatically to perform desired movements.
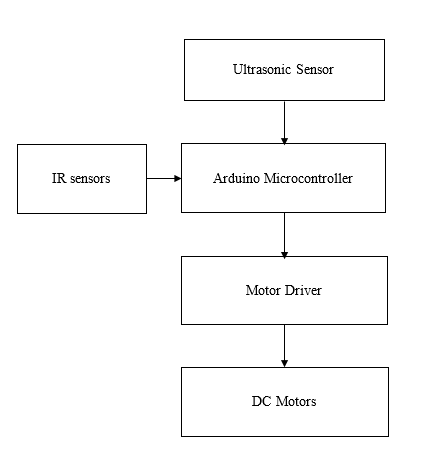
The Line Follower Robot consists of two IR sensors and an Ultrasonic sensor attached to it. When the left sensor comes on the black line, then the robot turns the left side in the black line and if the right sensor senses a black line, then the robot turns the right side until both the left and right sensor senses white then only the robot moves forward. If robot comes across a path where there is another black strip lying perpendicular to the path, then the robot stops at that instant.
BLOCK DIAGRAM